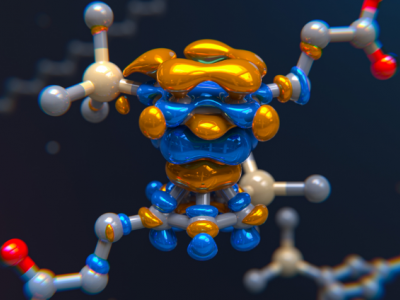
【色母粒产业网】5月21日消息,近日,美国普林斯顿大学的研究团队在Glaucio H. Paulino教授的带领下,从古老的折纸艺术中获得了灵感,成功研发出一种名为“超材料机器人”(metabot)的创新结构。这种结构以其独特的“手性”单元格为特点,通过电磁场指令即可实现远程操控,能够灵活地展现出扭动、收缩等复杂动作。
据色母粒产业网了解,研究团队利用手性超材料单元模块,通过单自由度驱动技术,将线性运动巧妙地转化为旋转运动。这一创新设计使得该组件能够在0°至90°范围内实现扭转,平面内收缩率高达25%,垂直方向收缩更是超过50%。通过展示线性位移和扭转驱动旋转压缩两种驱动模式,研究人员充分证明了超材料的可编程性与可扩展性,为多模式、多稳态、可编程变形机器人的研发开辟了新的道路。相关研究成果已在《Nature》杂志上发表。
与普通弹性材料仅具备单一变形模式不同,此次设计的负泊松比结构能够在不同驱动条件下同时实现扭转和收缩。这种独特的多模态变形机制得益于柱状阵列的特殊排列方式,该阵列由模块化的手性单元组成,能够以相同的角度扭转,并在变形过程中保持统一的高度和旋转角度。而这种结构单元的设计灵感正是源自折纸艺术。
折纸,这一古老的手工艺术,能够将二维平面材料折叠成复杂的三维结构。研究团队基于“Kresling折纸图案”的螺旋折叠模式,设计出了具有柔性可折叠特性的超材料。通过特定配置,每个单元仅允许沿顺时针或逆时针方向旋转,实现了高度可控的变形行为,为构建具备丰富响应特性的未来材料系统提供了新的可能。
研究团队还通过实验验证了两种驱动模式的效果。在旋转驱动模式下,超材料能够根据驱动器的旋转方向发生扭转变形和收缩;在线性压缩模式下,超材料则能够随着压缩程度的加深而发生轴向收缩和剧烈扭转。此外,研究团队还提出了一种可重构的模块化组装策略,通过连接具有相反手性的单元格构建模块化偶极子,再将其组装成三维超材料结构。这种策略使得超材料能够表现出多稳态特性和可调节的力学响应。

在应用场景方面,研究团队也进行了深入探索。例如,在组件中引入磁性偶极单元可实现远程无线控制;在组件表面引入光吸收材料则能够实现热辐射的捕获与散热双模式切换。此外,研究团队还展示了利用超材料模拟计算机中逻辑门功能的潜力,为加密信息的扩展应用提供了新的思路。
美国杨百翰大学的Philip Klocke和Larry L. Howell在同期《Nature》杂志的评论中指出:“折纸不仅为艺术提供了灵感,也为科学提供了启示,为开发具有新特性的材料提供了框架。”他们同时强调,规模化是超材料应用领域的关键问题。而Glaucio Paulino教授则表示:“这项研究展示了力矩可以被远程、瞬时且精确地传递,用来触发复杂的机器人动作。”麻省理工学院的Xuanhe Zhao教授也对此项工作给予了高度评价,认为它为折纸设计及其应用开辟了一条全新的道路。